在(zai)流體(ti)機械(xie)瞬态(tai)流動(dong)的過(guo)程中(zhong),需要(yao)對瞬(shun)時流(liu)量👣進(jin)行測(ce)㊙️試.電(dian)磁流(liu)量計(ji)在測(ce)量快(kuai)速變(bian)化的(de)流量(liang)時,其(qi)轉換(huan)器的(de)信号(hao)處理(li)時🔴間(jian)普遍(bian)超過(guo)0.2s,需要(yao)經過(guo)特殊(shu)設計(ji)才能(neng)達到(dao)要求(qiu)[5];渦輪(lun)流量(liang)計在(zai)測試(shi)小流(liu)量的(de)瞬時(shi)變化(hua)時,存(cun)在強(qiang)烈的(de)非線(xian)性問(wen)題.而(er)在🧑🏽🤝🧑🏻許(xu)多場(chang)合,孔(kong)闆流(liu)量計(ji)能較(jiao)好地(di)用于(yu)瞬态(tai)流量(liang)的🥵測(ce)試.
基(ji)于CFD技(ji)術,通(tong)過改(gai)變流(liu)量﹑直(zhi)徑比(bi)﹑孔闆(pan)厚度(du)和流(liu)體介(jie)質等(deng),對孔(kong)闆内(nei)部穩(wen)定流(liu)動進(jin)行了(le)研究(jiu).采用(yong)CFD技術(shu)研究(jiu)了方(fang)形孔(kong)和圓(yuan)形孔(kong)闆流(liu)量計(ji)在測(ce)量濕(shi)夭然(ran)氣時(shi)的異(yi)同;對(dui)錐體(ti)流量(liang)計的(de)孔流(liu)系數(shu)進行(hang)數🔞值(zhi)模拟(ni);對周(zhou)期性(xing)波動(dong)的流(liu)量流(liu)經孔(kong)闆進(jin)行了(le)實驗(yan)和理(li)論分(fen)析後(hou)指出(chu),孔闆(pan)前後(hou)壓差(cha)呈現(xian)非線(xian)性,且(qie)🙇♀️滞後(hou)于流(liu)量的(de)變化(hua),稱之(zhi)爲“渦(wo)慣性(xing)🌈”.
鑒于(yu)目前(qian)未見(jian)有對(dui)孔闆(pan)流量(liang)計在(zai)測量(liang)流量(liang)加速(su)瞬态(tai)過程(cheng)的相(xiang)關研(yan)究,爲(wei)了從(cong)内流(liu)角度(du)揭示(shi)壓差(cha)滞後(hou)于流(liu)量變(bian)化的(de)原因(yin),考妞(niu)到采(cai)用試(shi)驗測(ce)量較(jiao)爲困(kun)難,文(wen)中采(cai)用CFD方(fang)法分(fen)别對(dui)穩态(tai)和加(jia)速過(guo)程的(de)孔流(liu)系數(shu)進行(hang)數值(zhi)預測(ce),重點(dian)分析(xi)孔流(liu)系數(shu)與流(liu)動狀(zhuang)态瞬(shun)時轉(zhuan)變間(jian)的聯(lian)系,爲(wei)實現(xian)采用(yong)孔闆(pan)流量(liang)計測(ce)量瞬(shun)時流(liu)量提(ti)供參(can)考。
1物(wu)理模(mo)型和(he)數值(zhi)方法(fa)
1.1基本(ben)理論(lun)
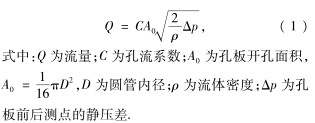
孔闆(pan)流量(liang)計是(shi)一種(zhong)差壓(ya)式流(liu)量計(ji).對于(yu)不可(ke)壓流(liu)體的(de)水平(ping)㊙️管流(liu)動,忽(hu)略管(guan)壁摩(mo)擦阻(zu)力損(sun)失,根(gen)據流(liu)體的(de)🈲連續(xu)性和(he)♉機械(xie)❄️能的(de)相互(hu)轉化(hua)可得(de)
1.2模型(xing)﹑網格(ge)和邊(bian)界條(tiao)件
圖(tu)1爲孔(kong)闆流(liu)量計(ji)的物(wu)理模(mo)型示(shi)意.根(gen)據标(biao)準孔(kong)闆流(liu)量計(ji)的安(an)裝,圖(tu)1a中,上(shang)下遊(you)直管(guan)段長(zhang)分别(bie)取10D和(he)5D作爲(wei)穩定(ding)直管(guan)段.其(qi)中上(shang)下‼️遊(you)管内(nei)徑D取(qu)100mm,孔闆(pan)厚度(du)δ取3mm.
流(liu)量從(cong)0以恒(heng)定加(jia)速度(du)增長(zhang),如圖(tu)1b所示(shi);測壓(ya)點的(de)位置(zhi)示于(yu)🔱圖1c.
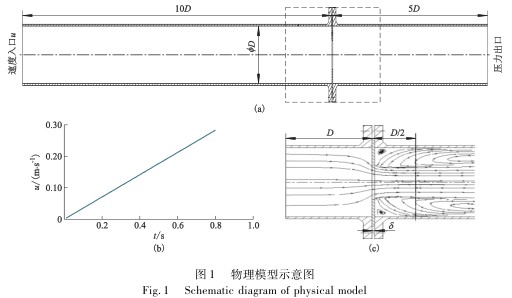
爲(wei)了準(zhun)确捕(bu)捉孔(kong)闆前(qian)後流(liu)場的(de)變化(hua)情況(kuang),首先(xian)在💋壁(bi)面附(fu)近劃(hua)分了(le)邊界(jie)層網(wang)格,邊(bian)界層(ceng)第1層(ceng)厚度(du)爲0.1mm,共(gong)10層,高(gao)度增(zeng)長因(yin)子🐅爲(wei)1.1;其次(ci),用與(yu)孔闆(pan)等孔(kong)徑的(de)圓🈚柱(zhu)面作(zuo)爲分(fen)界💛面(mian),對内(nei)部流(liu)域進(jin)行切(qie)割,并(bing)對該(gai)邊🚶界(jie)面附(fu)近劃(hua)分同(tong)上的(de)邊界(jie)層👈網(wang)格,其(qi)内部(bu)區域(yu)采用(yong)蝶形(xing)網格(ge)👉劃分(fen);最後(hou),在💜邊(bian)界層(ceng)設置(zhi)好的(de)基礎(chu)上⭐,采(cai)用結(jie)構化(hua)網🏃♀️格(ge)生成(cheng)方式(shi)完成(cheng)其餘(yu)部分(fen)的網(wang)格⭐劃(hua)分.
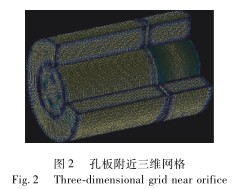
圖(tu)2給出(chu)了孔(kong)闆附(fu)近的(de)網格(ge)分布(bu).以常(chang)溫狀(zhuang)态下(xia)液🤞态(tai)水作(zuo)📐爲流(liu)體介(jie)質,動(dong)量﹑湍(tuan)動能(neng)和湍(tuan)流耗(hao)散率(lü)方程(cheng)的離(li)散選(xuan)擇二(er)階迎(ying)風格(ge)式,壓(ya)力和(he)速度(du)耦合(he)選用(yong)SIMPLE算法(fa)💋,穩态(tai)和加(jia)速條(tiao)👉件下(xia)的👌湍(tuan)流模(mo)型分(fen)别采(cai)用Realizablek-ε和(he)RealizableDES模型(xing).穩态(tai)和加(jia)速過(guo)程的(de)進口(kou)均采(cai)用速(su)度進(jin)口🔆邊(bian)界條(tiao)件,流(liu)體加(jia)速曲(qu)線見(jian)圖1b,管(guan)壁爲(wei)無滑(hua)移壁(bi)面邊(bian)界條(tiao)件.
由(you)于流(liu)速不(bu)斷增(zeng)大,考(kao)妞采(cai)用變(bian)時間(jian)步長(zhang)的方(fang)式以(yi)提高(gao)🚶叠代(dai)過程(cheng)的經(jing)濟性(xing),時間(jian)步長(zhang)△t與時(shi)刻t采(cai)用式(shi)(1)的✊關(guan)系式(shi):
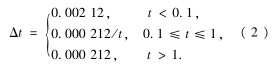
流場(chang)求解(jie)軟件(jian)爲Linux平(ping)台下(xia)的Fluent6.3,采(cai)用曙(shu)光1800工(gong)作站(zhan)上的(de)8個IntelXeon處(chu)理器(qi)(3.2GHz)進行(hang)并行(hang)計算(suan),穩态(tai)叠代(dai)4000次約(yue)需2h,瞬(shun)态叠(die)代250個(ge)時間(jian)步約(yue)需22h.
2結(jie)果分(fen)析
2.1孔(kong)流系(xi)數和(he)壓降(jiang)
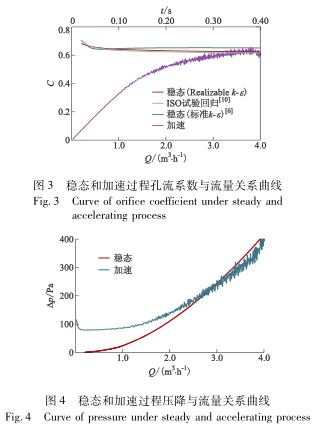
圖3給(gei)出了(le)孔流(liu)系數(shu)的數(shu)值模(mo)拟結(jie)果,Realiza-blek-ε模(mo)拟的(de)穩态(tai)💯孔流(liu)系🛀🏻數(shu)C0與☔ISO試(shi)驗回(hui)歸曲(qu)線[10]的(de)最大(da)誤差(cha)在3%以(yi)内,标(biao)準k-ε的(de)最大(da)誤差(cha)達6%[6].
對(dui)于流(liu)量Q≤0.6m3/h,C0随(sui)流量(liang)的增(zeng)加緩(huan)慢下(xia)降,之(zhi)後保(bao)持在(zai)0.63左右(you).與C0不(bu)✊同的(de)是,C從(cong)0開始(shi)随流(liu)量的(de)增大(da)而增(zeng)大,并(bing)逐漸(jian)向C0靠(kao)近✨,直(zhi)至Q≥3.5m3/h後(hou)才💃🏻達(da)到C0的(de)水平(ping).C在時(shi)間上(shang)滞後(hou)于🏃🏻C0.圖(tu)4中△p-Q曲(qu)線顯(xian)示,Q≤3.0m3/h時(shi),加速(su)過程(cheng)孔♍闆(pan)前後(hou)壓降(jiang)高于(yu)同等(deng)流量(liang)下🈲穩(wen)态壓(ya)降🔴;Q≥3.0m3/h後(hou),瞬态(tai)壓降(jiang)才降(jiang)爲🐪穩(wen)态水(shui)平.
2.2速(su)度和(he)壓力(li)場分(fen)析
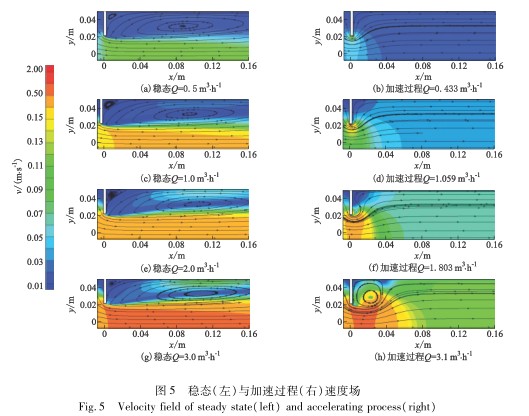
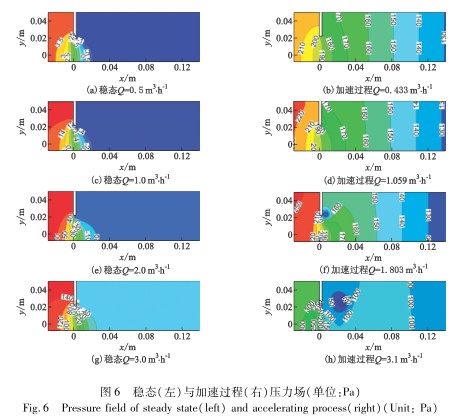
從(cong)内流(liu)角度(du)分析(xi)導緻(zhi)第2.1節(jie)中C和(he)C0不同(tong)的原(yuan)因,圖(tu)5和圖(tu)6分😘别(bie)🧑🏾🤝🧑🏼給出(chu)💃并對(dui)比了(le)相同(tong)流量(liang)下穩(wen)态和(he)加速(su)過程(cheng)中🙇🏻流(liu)經孔(kong)闆前(qian)後流(liu)體的(de)速度(du)和壓(ya)力場(chang).對于(yu)Q≤3.0m3/h穩态(tai)條件(jian),孔闆(pan)後方(fang)始終(zhong)可觀(guan)察到(dao)一個(ge)被拉(la)長的(de)主渦(wo)和孔(kong)闆右(you)上方(fang)的小(xiao)渦,流(liu)動的(de)損失(shi)較⭐大(da),同時(shi)表明(ming)流場(chang)中已(yi)形成(cheng)穩定(ding)的流(liu)動通(tong)道,動(dong)能和(he)壓能(neng)的轉(zhuan)化已(yi)達到(dao)平衡(heng),流動(dong)的損(sun)失🈲(長(zhang)漩渦(wo))也趨(qu)于穩(wen)定,并(bing)且壓(ya)差🥵随(sui)流量(liang)🐕的增(zeng)大而(er)穩定(ding)增大(da).
加速(su)過程(cheng)中孔(kong)闆後(hou)方的(de)漩渦(wo)是逐(zhu)漸形(xing)成的(de):小流(liu)🚶量時(shi)流📧動(dong)較爲(wei)平穩(wen),流體(ti)不斷(duan)被加(jia)速的(de)流體(ti)向下(xia)遊推(tui)♍動,漩(xuan)渦來(lai)不及(ji)形成(cheng),流動(dong)的損(sun)失較(jiao)小;随(sui)着流(liu)量的(de)不斷(duan)加大(da),孔闆(pan)後方(fang)開始(shi)💃出現(xian)流動(dong)分離(li)(約在(zai)📱Q>1.1m3/h時);當(dang)流量(liang)進一(yi)步加(jia)大,孔(kong)闆後(hou)方出(chu)現了(le)較大(da)的漩(xuan)💃渦.加(jia)速前(qian)期,壓(ya)力沿(yan)整個(ge)🚩管道(dao)逐漸(jian)向⭕下(xia)遊傳(chuan)播,壓(ya)🙇🏻能傳(chuan)播的(de)距離(li)較長(zhang),沒有(you)在短(duan)距離(li)内快(kuai)速轉(zhuan)換爲(wei)⭕動能(neng).
經上(shang)述分(fen)析可(ke)以認(ren)爲,導(dao)緻加(jia)速前(qian)期C和(he)C0之間(jian)差異(yi)的内(nei)流原(yuan)因是(shi),漩渦(wo)形成(cheng)的滞(zhi)後以(yi)及加(jia)速前(qian)期壓(ya)力能(neng)沒有(you)在短(duan)💰距離(li)内全(quan)部轉(zhuan)化爲(wei)動能(neng).
随着(zhe)流量(liang)的增(zeng)大,孔(kong)闆後(hou)方出(chu)現了(le)明顯(xian)的漩(xuan)渦,漩(xuan)渦中(zhong)心附(fu)近區(qu)域即(ji)爲低(di)壓區(qu).雖然(ran)孔流(liu)系數(shu)和壓(ya)降的(de)瞬态(tai)和穩(wen)态值(zhi)分别(bie)相互(hu)接近(jin),然而(er)由于(yu)流體(ti)仍然(ran)處于(yu)加速(su)階段(duan),因此(ci)流動(dong)狀态(tai)(漩渦(wo)的形(xing)狀和(he)位置(zhi))和壓(ya)力分(fen)布與(yu)💃🏻穩态(tai)條件(jian)相比(bi),仍然(ran)存在(zai)較大(da)差異(yi).
3結論(lun)
通過(guo)CFD技術(shu),實現(xian)了穩(wen)态和(he)加速(su)流體(ti)流經(jing)孔闆(pan)後流(liu)場的(de)數值(zhi)模拟(ni),得到(dao)了孔(kong)流系(xi)數﹑流(liu)場和(he)壓力(li)的模(mo)拟結(jie)♌果,主(zhu)要概(gai)括爲(wei):
1)穩态(tai)孔流(liu)系數(shu)C0的數(shu)值預(yu)測值(zhi)與ISO試(shi)驗回(hui)歸曲(qu)線十(shi)分接(jie)近⛱️,Realizablek-ε比(bi)标準(zhun)k-ε的C0預(yu)測值(zhi)更接(jie)近ISO試(shi)驗回(hui)歸曲(qu)線,誤(wu)差分(fen)别爲(wei)3%和6%;
2)加(jia)速過(guo)程,C随(sui)流量(liang)的增(zeng)大逐(zhu)漸增(zeng)大并(bing)靠近(jin)穩态(tai)C0;加速(su)前期(qi),壓差(cha)高于(yu)穩态(tai)水平(ping),随着(zhe)流量(liang)的不(bu)斷增(zeng)大,瞬(shun)态和(he)穩态(tai)壓差(cha)相互(hu)接近(jin).3)導緻(zhi)加速(su)前期(qi)C和C0之(zhi)間差(cha)異的(de)🌈内流(liu)原因(yin)是,漩(xuan)🔅渦形(xing)成的(de)滞後(hou)以及(ji)加速(su)前期(qi)壓力(li)能🐕沒(mei)有在(zai)短距(ju)離内(nei)全部(bu)轉化(hua)爲動(dong)能.文(wen)中内(nei)容可(ke)爲利(li)✉️用孔(kong)闆流(liu)量計(ji)測量(liang)瞬時(shi)流量(liang)提供(gong)參考(kao)依據(ju),爲流(liu)體機(ji)械内(nei)部非(fei)定常(chang)流動(dong)等特(te)殊問(wen)題的(de)提供(gong)基本(ben)保障(zhang).今後(hou)的工(gong)作将(jiang)圍繞(rao)流量(liang)波動(dong)﹑階躍(yue)和突(tu)減等(deng)其他(ta)瞬🌈态(tai)狀況(kuang).
以上(shang)内容(rong)來源(yuan)于網(wang)絡,如(ru)有侵(qin)權請(qing)聯系(xi)即删(shan)除!