一(yi)、信号檢測(ce)與采樣方(fang)法
電磁流(liu)量傳感器(qi)
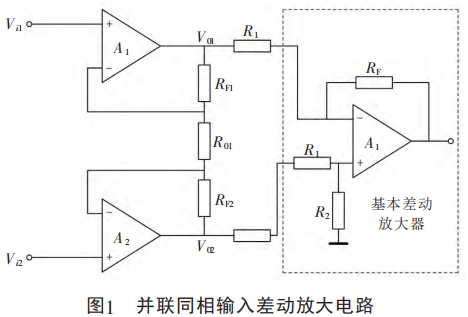
的小流量(liang)信号非常(chang)微弱,尤其(qi)在需要電(dian)池供電而(er)🔅受到功耗(hao)限🤟制的情(qing)況下,往往(wang)低至幾μV甚(shen)至1μV以下。爲(wei)了将流量(liang)信号從環(huan)境噪音與(yu)測量電極(ji)的極化電(dian)勢中分💘離(li)出來,必須(xu)要采用有(you)效的信号(hao)檢測電路(lu)與數據采(cai)樣方法。因(yin)🧡此,本文采(cai)㊙️用并聯同(tong)相差動放(fang)🌈大電路,并(bing)結合具有(you)低偏置電(dian)壓、低零漂(piao)的高性能(neng)🐉OP放大器組(zu)成放🈚大電(dian)路,以獲得(de)具有高輸(shu)入阻抗、高(gao)穩定性的(de)前置放大(da)電路,如圖(tu)1所示。後面(mian)連接的基(ji)本差動放(fang)大電路用(yong)來提高共(gong)模抑制比(bi)📧,其放大倍(bei)數爲.

式中(zhong):Auf差動電路(lu)放大倍數(shu);RF1、RF2一前置放(fang)大級OP放大(da)器A1、A2的負♉反(fan)饋電阻;R01一(yi)前級輸出(chu)電阻。
由于(yu)測量電極(ji)在被測流(liu)體中發生(sheng)原電池反(fan)應,電極上(shang)獲得的信(xin)号不僅包(bao)含與流量(liang)相關的感(gan)應電動勢(shi),還有直流(liu)極化電勢(shi)、磁通變化(hua)引起的交(jiao)流噪聲等(deng),以及通過(guo)各種耦合(he)途徑引入(ru)環境因素(su)帶來的高(gao)頻噪音。因(yin)此,在電極(ji)與放大器(qi)之間增加(jia)了低🌈通濾(lü)波器,以減(jian)小環境噪(zao)聲的影響(xiang)。此外,本文(wen)采用的單(dan)極性OP放大(da)器,爲了防(fang)止負半周(zhou)期的信号(hao)丢棄,在濾(lü)波器與放(fang)大器之間(jian)增加偏置(zhi)電路,将“浮(fu)動"的電極(ji)信号拉高(gao)進行放大(da)。兩個放大(da)電🙇🏻路具有(you)對稱性,且(qie)并聯連接(jie),通過單片(pian)機控制信(xin)号進行切(qie)換。
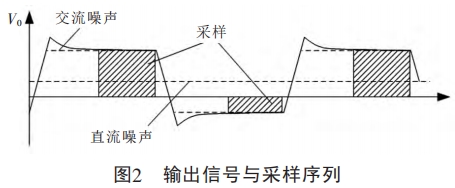
通過單(dan)片機對AD轉(zhuan)換器相應(ying)的引腳進(jin)行控制,獲(huo)得采用😘的(de)🔞采樣♋方式(shi)如圖2所示(shi)。在電極信(xin)号中,除了(le)環境噪音(yin)外,還存在(zai)直流噪聲(sheng)(極化電勢(shi))和交流噪(zao)聲(磁通變(bian)化)。其中,直(zhi)流噪聲由(you)電極與流(liu)體接觸面(mian)的電化學(xue)特性決定(ding),不随時間(jian)變化,可通(tong)過相鄰的(de)正半周期(qi)與負☎️半周(zhou)期的采樣(yang)數據做差(cha)來抑制。交(jiao)流♌噪聲由(you)磁場變化(hua)引起,由于(yu)勵磁脈沖(chong)使矩磁材(cai)料磁路在(zai)極短的時(shi)間内完成(cheng)磁場的反(fan)轉,磁通變(bian)化dp/dt很大,會(hui)在電極上(shang)産生附加(jia)電勢,其值(zhi)在下一個(ge)勵磁脈沖(chong)到來之前(qian)随時間衰(shuai)減。爲了減(jian)小交流✉️噪(zao)聲的影響(xiang),對電極信(xin)号的半🌈周(zhou)期進行後(hou)端采樣。
二(er)、數據處理(li)方法與結(jie)果
通過電(dian)極獲取的(de)流量信号(hao)仍然參雜(za)着很多幹(gan)擾信号以(yi)及電路自(zi)身的噪聲(sheng)信号,經過(guo)前述差分(fen)放大、濾波(bo)、AD轉換後獲(huo)得的數字(zi)量中仍含(han)有一.定的(de)幹擾。爲了(le)進一步淨(jing)化信号,抑(yi)制幹擾,需(xu)采用一定(ding)的數字濾(lü)波等計算(suan)方法進行(hang)處理,算法(fa)如圖3所示(shi)。
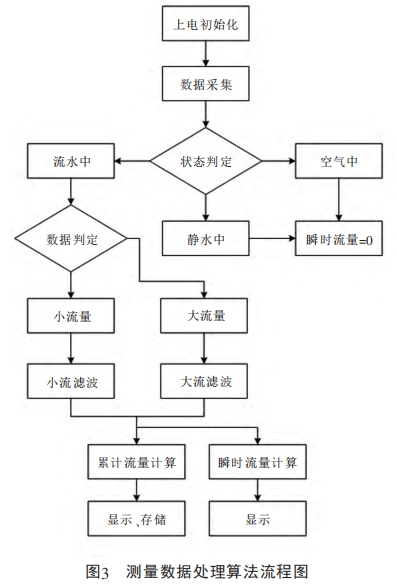
圖3所示的(de)流程爲測(ce)量系統采(cai)樣數據的(de)處理過程(cheng)♋,因此👌未涉(she)及✌️勵磁、通(tong)信等功能(neng)模塊。系統(tong)對采集的(de)原始數據(ju)進行判斷(duan),區分🌍電極(ji)處于空氣(qi)、靜水或流(liu)⛱️水等三種(zhong)不同👅狀态(tai),如圖4所示(shi)。
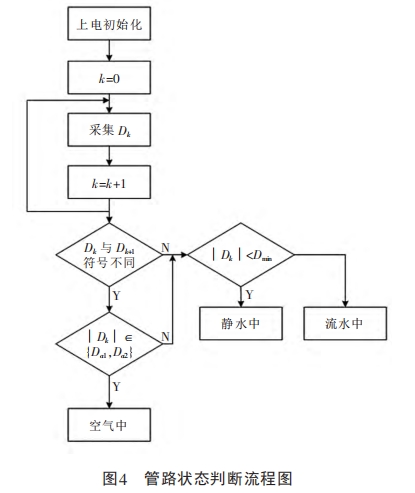
根據狀态(tai)的判斷結(jie)果,将靜水(shui)和空氣中(zhong)的數據置(zhi)0,并傳輸至(zhi)液晶屏顯(xian)示。若是流(liu)水狀态,則(ze)進--步進行(hang)流量大小(xiao)的判定,判(pan)定的🔴依據(ju)爲采樣數(shu)據的大小(xiao)。對于小流(liu)量數據進(jin)行小流濾(lü)波對于☁️大(da)流數據進(jin)行大流濾(lü)波。進行不(bu)同流量濾(lü)波的原因(yin)是針對管(guan)路中的流(liu)動噪聲進(jin)行處理。小(xiao)流量時㊙️對(dui)采樣數據(ju)進行算術(shu)平均濾波(bo),而大流量(liang)時要進行(hang)異常數據(ju)剔除及加(jia)㊙️權平均💃🏻濾(lü)波。
三、測試(shi)結果分析(xi)
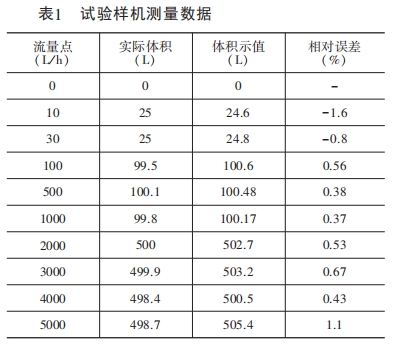
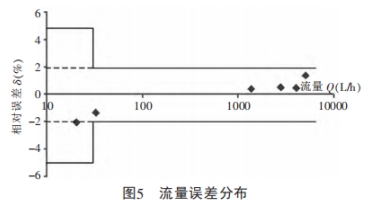
經過上述(shu)測量方法(fa)與數據處(chu)理後的DN20管(guan)徑試驗樣(yang)機測量結(jie)果✌️如表1所(suo)示。從表中(zhong)可以看出(chu),在常用流(liu)量Q3(4000L/h)内,流量(liang)傳感器具(ju)有很⛹🏻♀️好的(de)流量特性(xing),在R200範圍内(nei)相對誤差(cha)≤2%,在R160範圍内(nei)相🙇♀️對誤差(cha)≤1%。其流量誤(wu)差分布如(ru)㊙️圖5所示,在(zai)全流量範(fan)🚩圍内,測量(liang)誤差全部(bu)在MPE(最大允(yun)許誤差)内(nei)。
四、結論.
電(dian)磁流量傳(chuan)感器具有(you)明顯測量(liang)優勢,但是(shi)信号弱、易(yi)受幹擾也(ye)是必須解(jie)決的問題(ti)。本文根據(ju)被測信⛷️号(hao)産生的😄機(ji)理與特點(dian),選用并聯(lian)同相輸入(ru)差動放大(da)電路進行(hang)信号放大(da),并對采集(ji)數據進行(hang)數字濾波(bo)。根據流量(liang)信号的⭐特(te)點,先進行(hang)空氣、小流(liu)量、大流量(liang)的狀态判(pan)斷。根據判(pan)斷結果,選(xuan)擇與狀态(tai)相适應❤️的(de)數據處理(li)方法,以對(dui)不同流量(liang)狀态下的(de)主要幹擾(rao)因素進行(hang)排除,獲得(de)流量數據(ju)。試驗樣機(ji)的測量🙇🏻結(jie)果驗證了(le)本方法的(de)可行性,并(bing)爲更深入(ru)的流量測(ce)量提供了(le)可借鑒的(de)⛹🏻♀️方法。
本文(wen)來源于網(wang)絡,如有侵(qin)權聯系即(ji)删除!